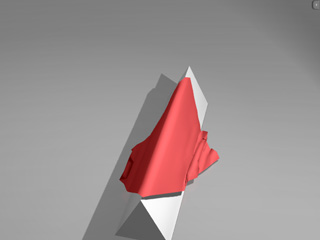
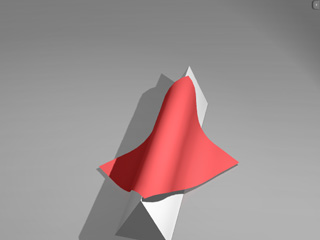
Stiffness = 100
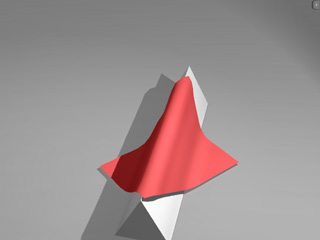
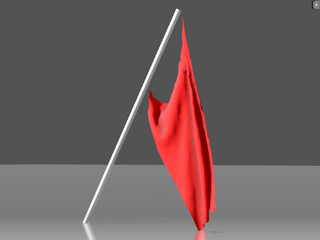
Stiffness = 10
The Stiffness, Bending Constraint and Solver Iterations decide the softness of a soft body.
The Stiffness affects the entire soft body, the Bending Constraint focuses on the strength between two vertexes, and the Solver Iterations calculate the animation details for the soft body.
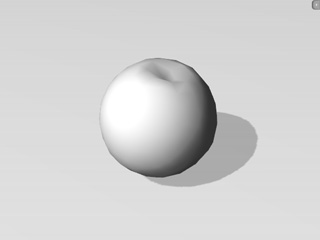
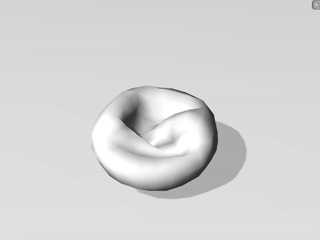
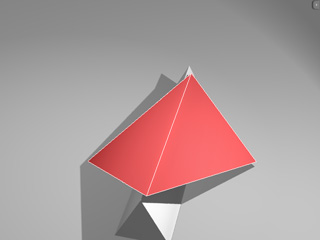
The stiffness decides how hard the soft body is during collision. The higher the value, the harder the soft body is.
The illustrations below show the statues of two soft bodies with different stiffness when they hit the floor.
|
|
|
|
Stiffness = 100 |
Stiffness = 10 |
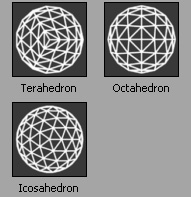
Although stiffness decides the appearance of the soft body when it collides, the mesh is also influenced. For soft body objects, the mesh structure sometimes significantly affects the physics behavior.
|
|
Balls with different mesh structures. |
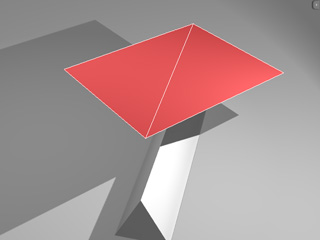
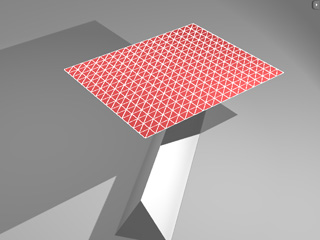
When collision happens, the skin of the soft body starts to bend on the edges of adjacent faces. Therefore the more faces your object has, the smoother a soft body you can get. However, it will consume more system resources.
|
|
|
Object with low number of faces. |
Collision result. |
|
|
|
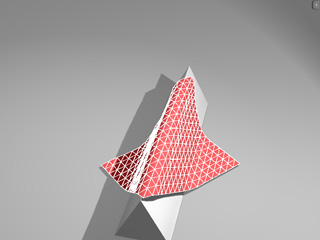
Object with higher number of faces. |
Collision result. |
Bending constraint is the distance of two vertexes that produce tension on a surface. The lower the value, the smaller the distance is - which diminishes the tension between two vertexes. You may use this value to decide the bending status of the collided areas on a surface. It is highly suggested that you use the default value (2) in order to have the best optimized results.
|
|
|
Bending Constraint = 1 (no tension at all) |
The collided areas are very soft. |
|
|
|
Bending Constraint = 2 (default) |
The collided areas are soft. |
|
|
|
Bending Constraint = 3 |
The collided areas are stronger. |
The Solver Iterations decides how many times the soft body status are calculated within two time frames. Therefore the higher the value, the more animation details appear before the soft body rests again; and the harder the soft body is.
Because Solver Iterations have relations to the Collision Margin, then please refer to the Solver Iteration and Collision Margin section for more information.
|

|
|
Stiffness = 90 Bending Constrain = 2 Solver Iterations = 1 (Fewer animation details - silk) |
Stiffness = 90 Bending Constrain = 2 Solver Iterations = 50 (More animation details - rubber) |
|
Note: |
|